Robot Arm was a Science Olympiad event in the 2011-2012 and 2012-2013 seasons. In 2012, John Roberts and I placed 1st at the New York State Competition and 2nd at the National Competition. In 2013, Tiberiu Mihaila and I placed 1st at the State Competition and 5th at the National Competition.
You can read the full research paper: here.
Introduction
Robot Arm is an event in Science Olympiad that requires competitors to build a robot arm capable of rapidly completing a series of specified tasks on the day of competition. This page describes the process of building the Robot and the decision making involved in successive redesigns of the Robot Arm. Early versions of the arm, while competent to complete some of the tasks, fell short of the goal. Improvements were incorporated into the robot after each competition. The final Robot Arm was capable of maximal performance in the National competition, earning the total possible points for the event and achieving 2nd place at the 2012 National Tournament.
Iterations
The robot arm was originally designed for use with a wireless, PS2 joystick controller. The orginal motherboard had a wireless receiver, and transmitted the received signal from the wireless controller to the servos in the arm. This Joystick controlled system was used in the first two competitions (Regionals 2012 and Invitationals 2012).
It was determined that the task could be more effectively completed using a different controller method. A Slave/Master System replaced the Joystick Controlled System. A small replica (or the master) of the robot arm was created and maneuvered to control the larger robot. The robot was the slave and replicated the movements of the master. The new control system required a wire to connect the master and the slave. For this task, the Master/Slave worked better than the PS2 Joystick Controller System and was able to achieve a higher score.
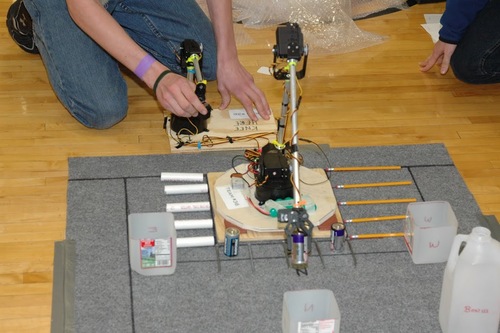
joystick controlled system
Construction

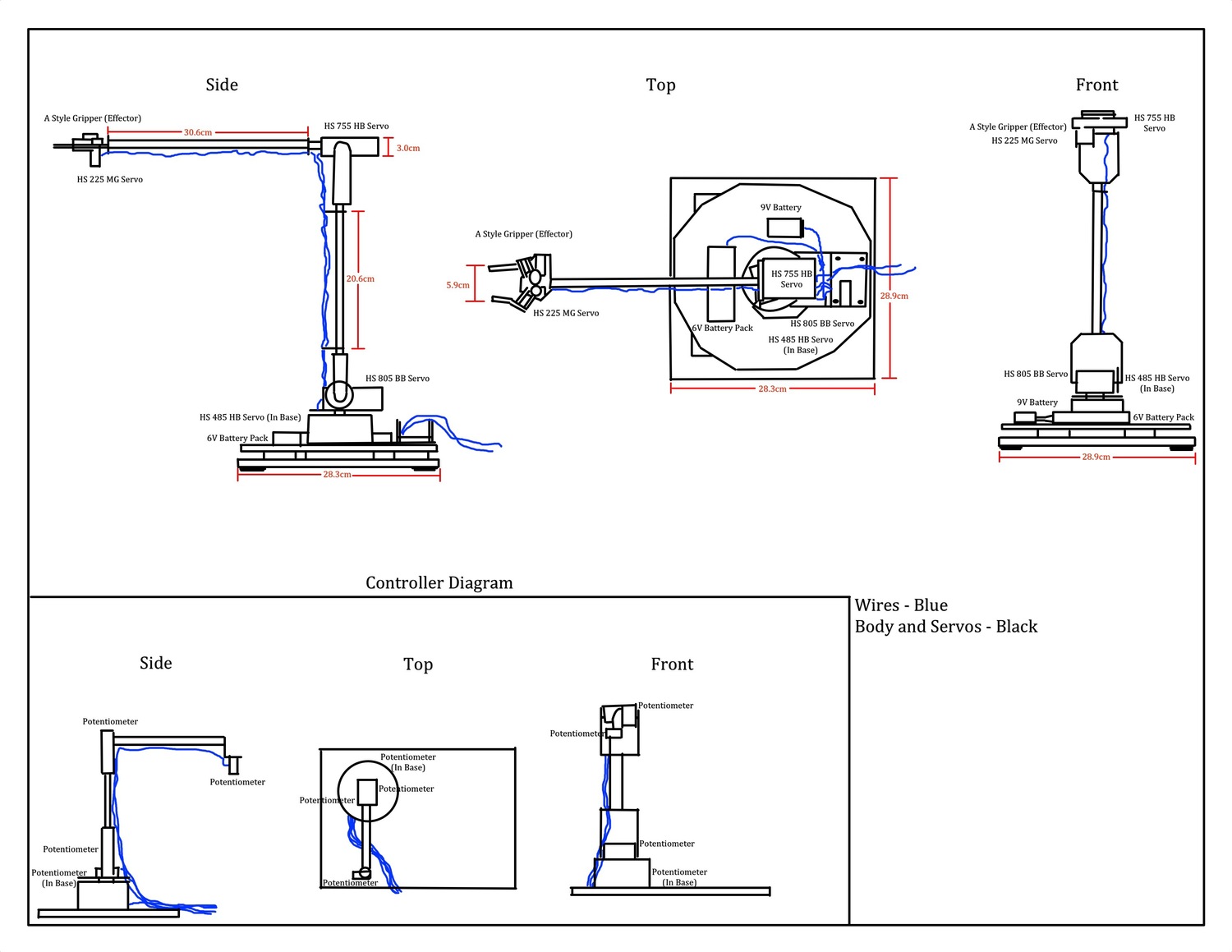
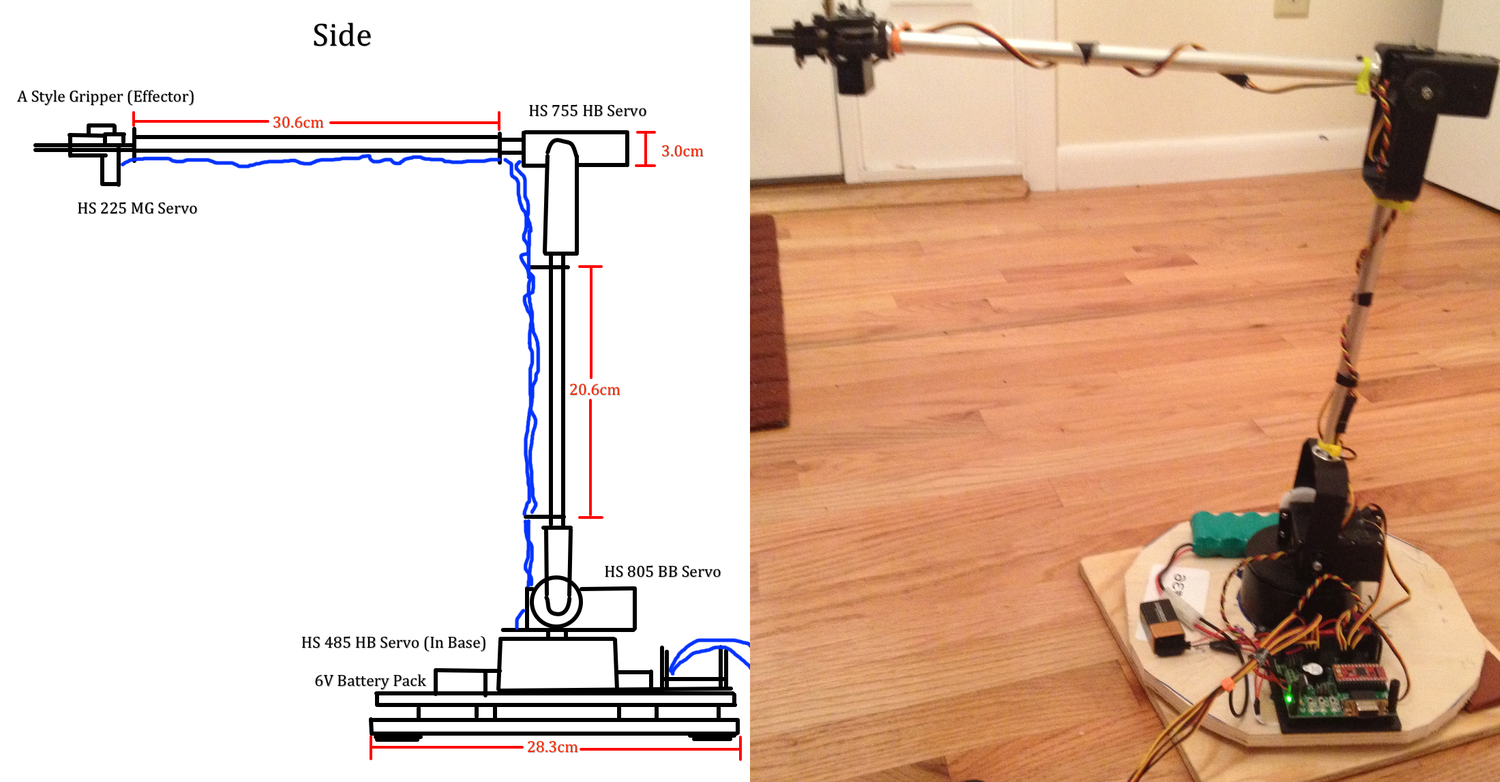
The construction of the Joystick Controlled System was wireless, and completely contained on a wooden base within the Arm Square of the Competition Floor. The arm had a servo that could rotate 180 degrees, the HS 485 HB Servo, on top of the wooden base. A metal enclosure holding the HS 805 BB Servo (known as shoulder servo) that controlled the upward and downward movement of the entire arm was on top of the rotating base servo. The base servo was connected to a 20.6 cm aluminum rod acting as an ”upper arm” for the robot. At the end of the robot was an ”elbow servo,” the HS 755 HB Servo. A 30.6 cm rod was attached to the elbow servo which held the grabber at the end of the arm. All of the servos were wired to the SSC-32 micro-controller.
Parts Used
The arm used 4 servos. All of the servos were manufactured by Servo City. The extension of the arm was made of parts purchased from Lynx Motion. All other parts, such as wires and the wooden base, were generic and available at a local hardware store. Part selection was guided by the strategy needed to earn points during the competition. In the event that two or more teams earned the same number of points, tiebreakers would be used to determine the winner. The first tiebreak for the competition was lowest number of servo motors. Fewer servos earned a higher score, but made the robot less maneuverable. Tests were conducted comparing the maneuverability of 6, 5, and 4 servos. The robot with 5 to 6 servos was very accurate and had more freedom of movement, but it was not an efficient use of the servos. One or two servos were rarely used. Robots were also tested with 3 servos. They were too inaccurate and could not reach the same score as robots with four servos. It appeared that a robot with 4 servos could achieve a high score while not sacrificing accuracy.
Microcontroller
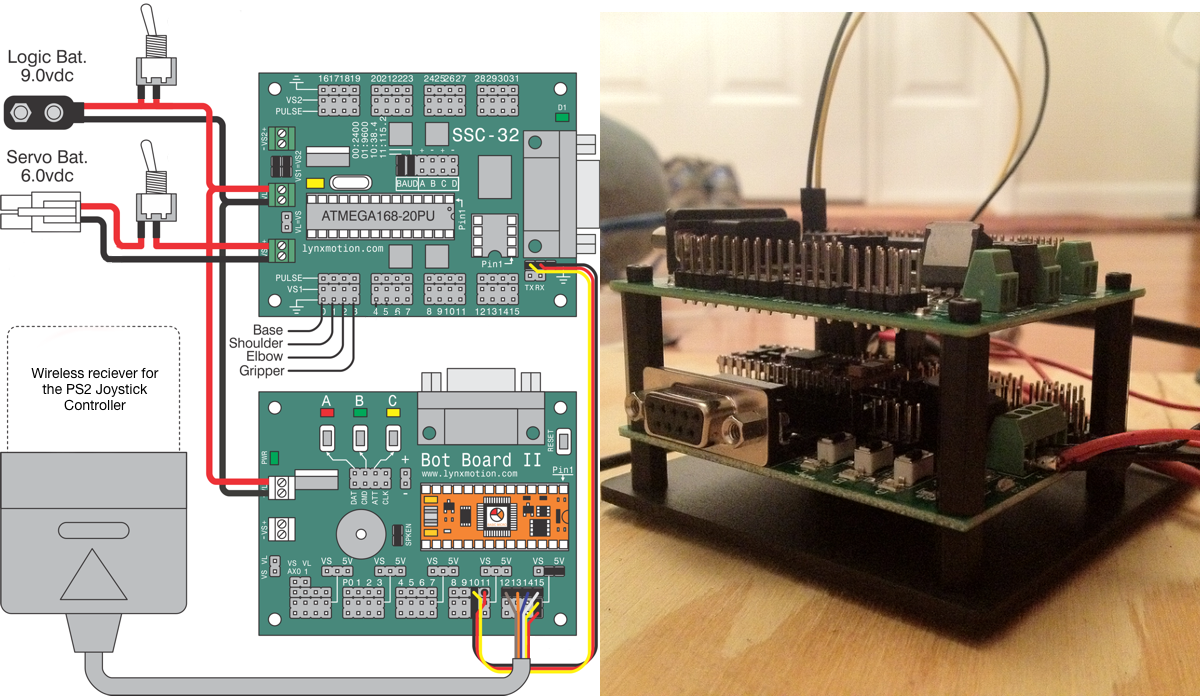
The original controller was wireless, and the receiver was wired to the Bot Board II micro-controller. The Bot Board II received the input from the controller, and contained the code on the attached Basic Atom Pro. The Bot Board II was wired to the SSC-32, which directly controlled the servos. Both power sources were also connected to the SSC-32.
Operating Strategy
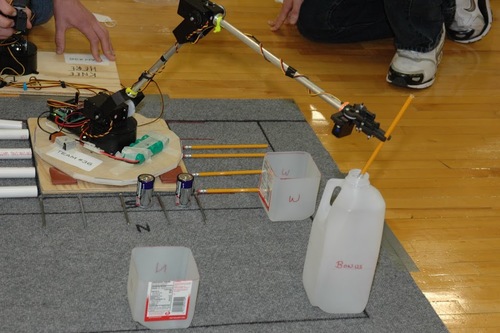
The plan most likely to earn the highest number of points was to first place the highest point value objects in the goals. Therefore, the arm would first place the batteries in each goal box before placing the other objects in the goal boxes. Next, a pencil, nail, and battery would be placed in the Bonus Box. If time remained, the items that were to be placed in the respective goal boxes would be attempted. Due to the nature of the servos, which could only rotate 180 degrees, objects on the far ends were more difficult to reach, and were attempted only after the objects in the center (closest to the North Zone) were moved.
Results and Problems
Numerous problems occurred with the Joystick Controlled System. The joy- stick made it difficult to control the arm and it took too long to pick up each item. Items were easily knocked out of the competition area. Further, the arm lacked the full range of motion needed to pick up the pieces that were on the far left or right.
The robot received a score of 28 out of 94 in 3:00 minutes at the Regional Competition 2012 (at Le Moyne College, Syracuse, NY). A month later, the robot earned a score of 26 in 3:00 minutes at the Invitational Competition 2012 (in Mentor, OH). The decrease in score at the Invitational was due to multiple objects being knocked out of the competition floor. After invitationals, the robot was redesigned using a Master/Slave System.
Master/Slave System
Changes to the Robot Body
All of the robot servos and controller servos have a 180 degree range. This limited range caused a problem for the base servo, because the objects in the competition are laid out over 270 degrees. Therefore, some objects were beyond the reach of the arm. To fix the problem, the base was modified with a lazy-Susan device placed under the base servo. When the arm needs to pass its current degree of freedom, the operator can pivot the robot. The robot arm must be pushed into the ground to create a pivot point. Then, while the base servo rotates, the lazy-Susan moves with it, letting the degree of rotation change orientation to be able to cover a different region of the board. Modifications of the base allowed it to spin 360 degrees.
Master/Slave Controls
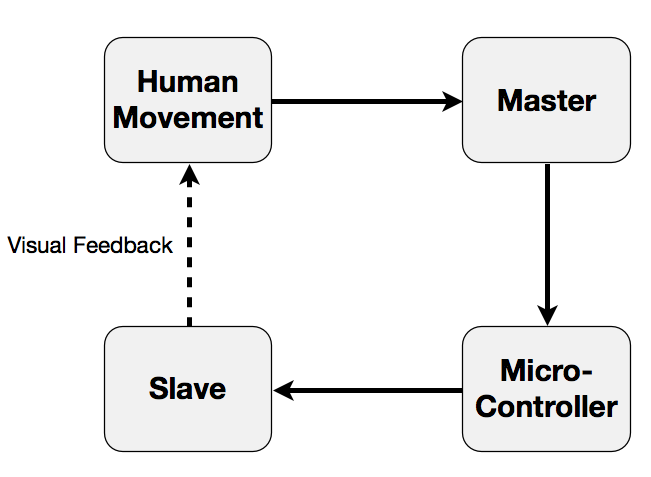
One of the biggest problems with the original robot was its inability to execute fine and smooth movements. To recreate the fluid movements of a human arm, the Joystick System was replaced with a Master/Slave System. In a Master/Slave system, a second version of the robot (considered the mas- ter), shown in Figure 5 is used to control the slave robot. The slave robot copies the exact movements of the master. The robot is controlled with a smaller replica of the arm. As shown in Figure 4, the human operator moves the master controller based on the previous movements of the slave controller. The controller contains all of the same servos with modifications. All of the servos were been turned into potentiometers, a variable resistor that sends information about the position of the servo to the motherboard. As one turns the servo on the controller, the arms servo turns to the same position. The motherboard then transmits the information to the actual robot arm. Since every servo on the arm always matches the location of the modified servos on the controller, the overall arm mimics the motion of the controller when an operator moves the controller. Besides the servos and the servo holders, the controller uses similar but proportionally shorter pieces of the actual arm for the body. This gives the controller the same appearance and maneuverability of the actual arm but is smaller.
Micro-Controller and Code Improvements
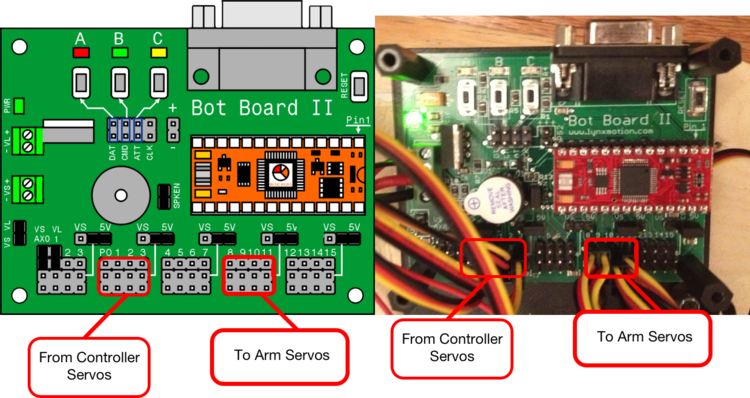
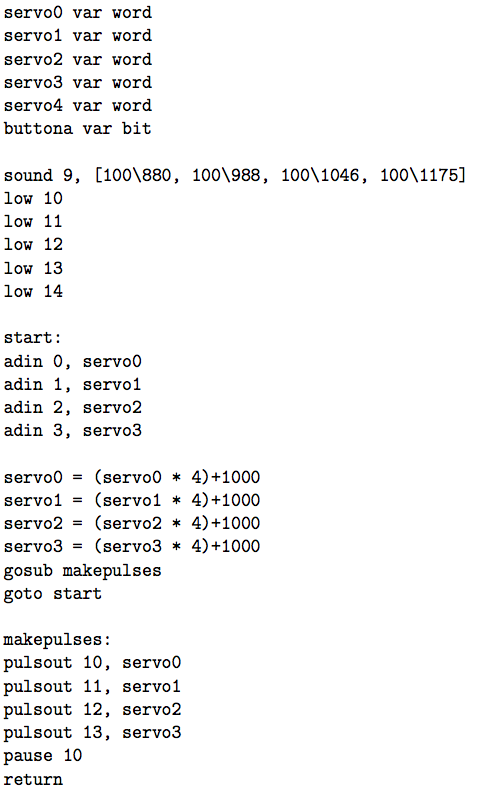
The embedded system has a micro-controller on a Bot Board II micro- controller carrier. A BASIC Atom Pro was the micro-controller used to control the Bot Board II using the BASIC Stamp language. The four robot servos were wired to I/O pins 1 through 4. The modified servos that control the arm. were wired to I/O pins 10 to 14. The code in the Atom Pro used to transfer the input from the controlling servos to the output of the robot servos is shown on the left.
The code (shown in Figure 7) allows the Atom Pro to determine the position of the controlling servo (via pulses being inputted to the Bot Board). The Atom Pro then transmits those signals to the robot servos very rapidly so that the robot servo matches its corresponding controller servo.
The Master/Slave System uses two power sources, one powers the robot servos while the other powers the Bot Board II and the Atom Pro. The robot servos are powered by a 6V battery pack (five Sub-C cells with a total capacity of 2800 mAh). The motherboard is powered by a generic 9V battery.
Revised Strategy
The maximum amount of points that could be earned was 94. It was determined that the best order and method to earn points was to aim for the highest point value items first but also try to reduce excess movement. This ensured that if there was a mistake, such as items knocked out of the competition floor, there would still be more items of the same type to try again. The strategy also allowed the task to be completed within the allotted time by moving efficiently. At the start of the competition, the robots base pointed directly north. First, a pencil, nail, and PVC pipe were placed in the Bonus Box using the pieces closest to the Bonus Box while keeping the base still. Next, one of batteries was placed in each of the three goal boxes while keeping the base still. The remaining battery was placed somewhere in the North Zone to earn a single point, but the only point available for it to earn. With the base still pointing north, all four of the remaining nails were placed in the North Goal. The robot arm then pivoted its base to face far enough east that it could reach all of PVC pipes. The remaining PVC pipes were all placed in the East Goal to earn maximum points. Finally, the robot base pivoted 180 degrees to face and access all of the pencils. The remaining pencils were all placed in the West Goal. This earned a perfect score and achieved maximal efficiency. The task was completed within three minutes. Previous versions of the robot that did not have a rotating base were unable to earn the maximum points with the pencils and PVC pipes.
Discussion
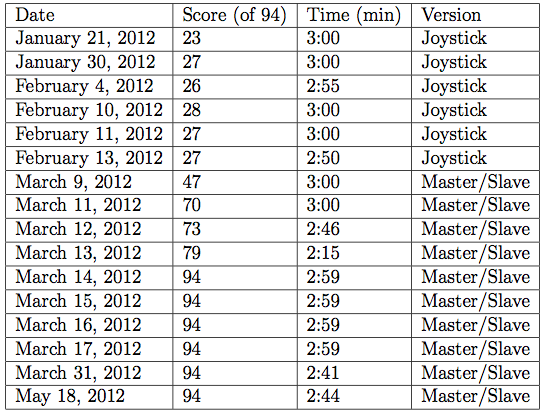
As shown in Table 2, the superiority of the Master/Slave over the joystick design was evident throughout the Science Olympiad competitions. The final version was sufficiently sensitive to be capable of locating, grabbing, positioning, and releasing each object within the time limit. The operator could make precise movements quickly. If there were problems, it could adapt to any changes or problems during the competition.
Different environments might require different robotic designs. For this competition, the Master/Slave System was ideal to complete the task. It had the dexterity to complete any task in a 360 degree range. The Science Olympiad event was most analogous to a cluttered space which had to be cleaned and organized in a specific way. The joystick can be operated from a distance, but does not give the dexterity of the Master/Slave System.
References
- AL5 Programming Tutorial PS2 RC Rev. 1, 2012, LynxMotion. (March 6, 2012)
- Division C Rules Manual, 1 September 2011, Science Olympiad, p. C20- C21 (January, 2012)
- Hitec Servo, 2012, Servo City. (March 6, 2012)
Acknowledgements
- John Roberts, F-M Class of 2012. Teammate on Robot Arm, 2011-2012.
- Tiberiu Mihaila, F-M Class of 2015. Teammate of Robot Arm, 2012-2013.
- Jamie Cucinotta, F-M Science Olympiad Head Coach.